http://shittyartpoi.blogspot.com/
new blog
onsdag 14 mars 2012
söndag 7 november 2010

tisdag 2 november 2010


torsdag 21 oktober 2010
robotics and speedpaints
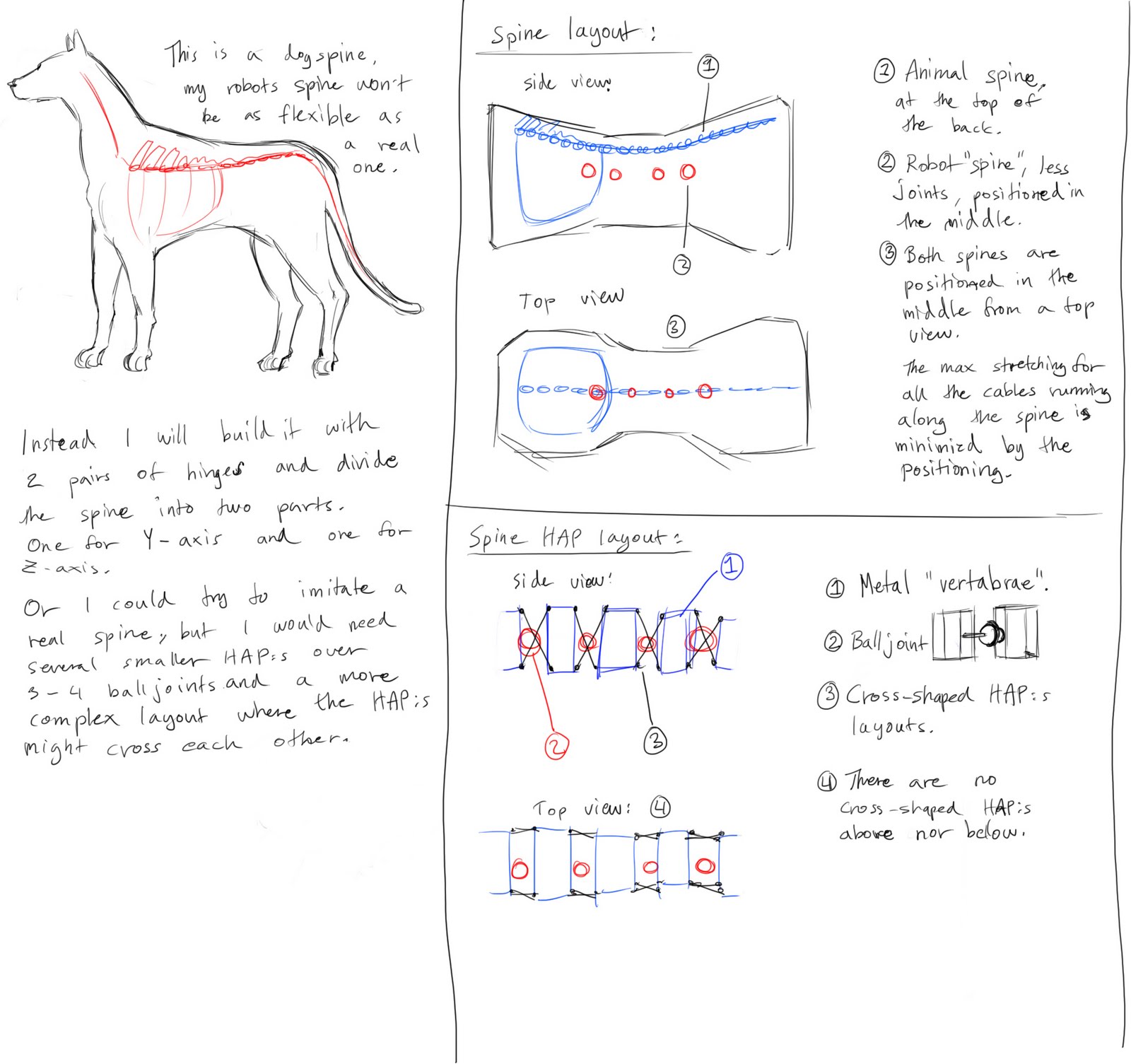
Robotics-notes...





---------
Some of the speedies I've done the past few days.






This last one is the only one I took time on, which was 30 minutes. Preeeettty ugly, I'm gonna need to get significantly better with shorter work time.
No references for anything except my notes.




---------
Some of the speedies I've done the past few days.






This last one is the only one I took time on, which was 30 minutes. Preeeettty ugly, I'm gonna need to get significantly better with shorter work time.
No references for anything except my notes.
måndag 11 oktober 2010
Robotics in laymann manners:
Powering the robot:
----
(All of this is ultra simplified explanations, so don't take them factually. Go look for your own answers if you think it's interesting!)
Hydraulics:

Mechanical properties of liquids.
By the use of pressurized liquids, hydraulics gnerate, control andtransmit power.
Pneumatic Energy:

Pneumatic energy is generated through compressed force of movement of air and gas in a confined area.
Electronic nervous system:
Wires and sensors carrying out commands from a control panel or autopilot.
Robot identity:
----
Special purpose device end effectors:
Normally, you'd use a living being for templating a robot, observing life and function and to imitate, but since our current technology is limited we don't have complex giant elefant robots and mechanical space-war-suits yet. Instead, we're building robots with specific roles and purposes mainly for industrial production. For this, a simplified design is needed for cost optimality and function efficiency. End-effectors are the parts in a robot built specifically for their role, for example, a jointed arm (Multi-linked manipulator) robot in most cases does not need grappling as complex as that of a human hand and is so replaced by a simpler design.
Stationary robots:
Robots with minimal purpose will not need to move around a lot and is therefore kept stationary with a body and ususally with multi-linked manipulators. This reduces calculation in a coefficient manner.
Mobile robots:
Capable of movement in a given environment.
Presently the research focus at many major universities.
Integrated into military, industry and security environmental use, also for consumer entertainment.
Classifications:
- Land/Home/Humanoid robots. (Tracks, wheels or legs.)
- Unmanned aerial vehicles
- Autonomous underwater vehicles
Nanomachines:
A miniscule robot with precision interaction properties at a nanoscale.
Currently there are only primitive prototypes using electronical sensor nervous systems.
Artificial intelligence:
True A.I does not exist as of yet. True A.I would mean having said robot gaining self awareness and a personality like a baby, to generate and control subjective decisions. As of now, we've only got programmed A.I that calculates solutions. Without the growth of awareness, it will be limited only to it's programmed function.
Aesthetics:
At this time, no one really cares for the aesthetics of a robot. Our present holds only room enough for function as of yet, which is cool in a primitive way.
-----------
Now comes the fun part!
I will design my own robots and update them as I go, 11 of them!
Functional:
1. Hydraulics based, minor, mobile, lifting, home-robot
2. Pneumatic energy based construction robot.
3. Assembling unit of mechanical parts with an electronical nervous system and base complex.
Military:
4. Mechanical space war-suit
5. Land war-suit
6. A.I Home-bot Scout unit
7. Unmanned A.I aerial vehicle with transformation properties to become a heavy home-bot.
8. Nanomachine, sound-rejecting, anti thermal detection, light-bending suit.
9. A.I land-bot
Entertainment:
10. HOOVER BOARDS! No just kidding. Supportive, pneumatic exoskeleton free-running boosting shoes.
11. A cute toy of sorts with limited A.I speech functionalities but programmed with the ability to adapt to situations.
--------
For my next silly laymann research, I will reflect over environment types.
----
(All of this is ultra simplified explanations, so don't take them factually. Go look for your own answers if you think it's interesting!)
Hydraulics:

Mechanical properties of liquids.
By the use of pressurized liquids, hydraulics gnerate, control andtransmit power.
Pneumatic Energy:

Pneumatic energy is generated through compressed force of movement of air and gas in a confined area.
Electronic nervous system:
Wires and sensors carrying out commands from a control panel or autopilot.
Robot identity:
----
Special purpose device end effectors:
Normally, you'd use a living being for templating a robot, observing life and function and to imitate, but since our current technology is limited we don't have complex giant elefant robots and mechanical space-war-suits yet. Instead, we're building robots with specific roles and purposes mainly for industrial production. For this, a simplified design is needed for cost optimality and function efficiency. End-effectors are the parts in a robot built specifically for their role, for example, a jointed arm (Multi-linked manipulator) robot in most cases does not need grappling as complex as that of a human hand and is so replaced by a simpler design.
Stationary robots:
Robots with minimal purpose will not need to move around a lot and is therefore kept stationary with a body and ususally with multi-linked manipulators. This reduces calculation in a coefficient manner.
Mobile robots:
Capable of movement in a given environment.
Presently the research focus at many major universities.
Integrated into military, industry and security environmental use, also for consumer entertainment.
Classifications:
- Land/Home/Humanoid robots. (Tracks, wheels or legs.)
- Unmanned aerial vehicles
- Autonomous underwater vehicles
Nanomachines:
A miniscule robot with precision interaction properties at a nanoscale.
Currently there are only primitive prototypes using electronical sensor nervous systems.
Artificial intelligence:
True A.I does not exist as of yet. True A.I would mean having said robot gaining self awareness and a personality like a baby, to generate and control subjective decisions. As of now, we've only got programmed A.I that calculates solutions. Without the growth of awareness, it will be limited only to it's programmed function.
Aesthetics:
At this time, no one really cares for the aesthetics of a robot. Our present holds only room enough for function as of yet, which is cool in a primitive way.
-----------
Now comes the fun part!
I will design my own robots and update them as I go, 11 of them!
Functional:
1. Hydraulics based, minor, mobile, lifting, home-robot
2. Pneumatic energy based construction robot.
3. Assembling unit of mechanical parts with an electronical nervous system and base complex.
Military:
4. Mechanical space war-suit
5. Land war-suit
6. A.I Home-bot Scout unit
7. Unmanned A.I aerial vehicle with transformation properties to become a heavy home-bot.
8. Nanomachine, sound-rejecting, anti thermal detection, light-bending suit.
9. A.I land-bot
Entertainment:
10. HOOVER BOARDS! No just kidding. Supportive, pneumatic exoskeleton free-running boosting shoes.
11. A cute toy of sorts with limited A.I speech functionalities but programmed with the ability to adapt to situations.
--------
For my next silly laymann research, I will reflect over environment types.
Prenumerera på:
Kommentarer (Atom)